Medical robotics
- Share
- Share on Facebook
- Share on LinkedIn
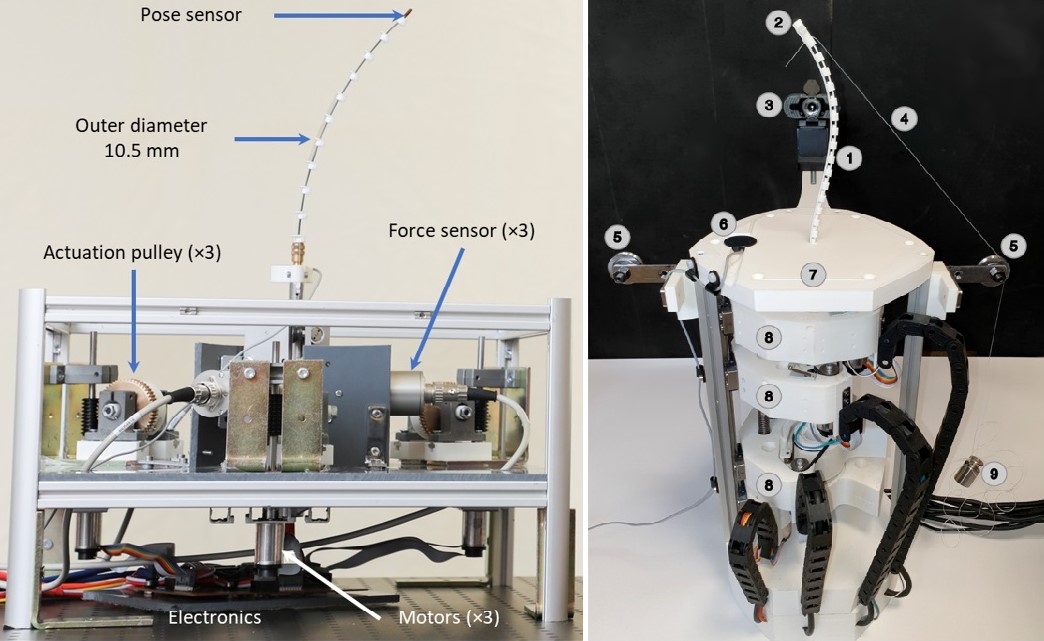
The objective is to create software (simulators) and hardware (instrumented continuum robots) environments to allow evolving design, modeling, and control approaches.
This first platform in France and Europe - to the best of our knowledge - has the ambition to progressively offer an agile playground for rapid prototyping of continuum robot applications and validation of models and control theories.
Partner
- TIMC
- Share
- Share on Facebook
- Share on LinkedIn